CATEGORIES:
BiologyChemistryConstructionCultureEcologyEconomyElectronicsFinanceGeographyHistoryInformaticsLawMathematicsMechanicsMedicineOtherPedagogyPhilosophyPhysicsPolicyPsychologySociologySportTourism
Frequency rotation regulator of indirect action with isodromic feedback
Flexible or izodromic feedback is called a feedback, which, acting at the beginning ofthe transition process as RFB, as controlling parameter approaches to the set value gradually reduces its effect on the control system.
Frequency rotation regulator with isodromic feedback, principle scheme of which is shown on fig.5.5., combines advantages of astatic regulator without feedback and regulator withRFB, especially: absents of static control error and good dynamic characteristics at well-chosen regulator parameters.
|
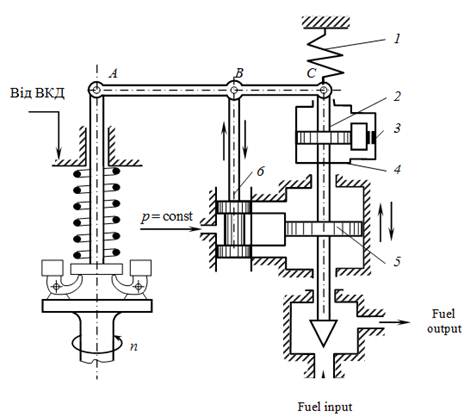
Fig 5.5. Structural scheme of frequency rotation regulator with indirect action with IF
1 – isodromic’s spring; 2 – piston; 3 – bleed; 4 – cylinder; 5 – servomechanism; 6 – govern slide
On fig 5.5 we can see, that in the isodromic regulator between the servomechanism piston(5) and slide (6) the rigid mechanical feedback is absent. In the given regulator servomechanism piston connected with lever AC through the special device, which have name isodromic. In the given scheme isodromic consists of piston 2, which is connected to the lever AC, cylinder 4, connected to servomechanism piston and isodromic spring 1, which works on both compression and tension.
Izodromic’s cylinder filled with viscous fluid (for example - oil), its cavity on both sides of the piston 2connected between each other by a channel in which the jet 3is located.
As it was mentioned, at the beginning of the control process the izodromic regulator operates like aregulator with RFB. At engine deviation from the equilibrium mode, for example, at speed rotation increasing, valve 6 will move up and open access of the working fluid in the upper cavity ofthe servomechanism cylinder. The servomechanism piston will move down and entailslever AC as well as in the controller with RFB. Simultaneously valve will close to the neutral position.
However, at point C movement of AC leverdown the spring 1 will stretch and on piston 2 thepressure drop will occur. Under the influence of pressure drop through the jet 3 the fluid willflow from the upper cavity of the cylinder to the bottom. Tensioned spring 1 (being pressed)slightly lifts up the lever and valve, causing movement of the piston servomechanismsand DG a little down.
The servomechanismpistonand connected with it dosingneedleduringcontrolat loadchangingfirstlythe most of theirpathpassesquickly, andat approachingthe equilibriummodetheirmovementis slowing down.Consequently,enginewillgraduallyapproach to theequilibriummode.
After thetransition process ends and equilibriumspeedof the rotorengine restores theservomechanismspistonandDGare occupies new provision, the piston 2 will changepositionrelative tothe cylinder4,butvalve6 andizodromicspring1 will take a neutral position, supportingthe previous regime of rotation atthe newfuel consumption.Thus,at the endof the controlprocess the staticerroriscompletelyremoved.
The dynamic characteristic of izodromical regulator isdetermined by the jet3 resistance andspring stiffness 1.Ifyou reduce the jet3 flow hole or low down the spring 1stiffness, the izodromical regulator will close by their characteristics to static and time required for determining of static error control increase.
At jet resistance reducing and spring regulator 1 rigidityincreasing by their properties will approach to the astatic.
Advantages of regulator:
· izodromical controller provides satisfactory static and dynamic characteristics of frequency rotation ACS that meet the requirements, that are used in GTU (GTE), operating in a wide range of external conditions changes.
Disdvantages of regulator:
· significant characteristics deterioration in thetransition process of control system at significant deviations in external conditions of the engine operation from thesettlements;
· consequently complex governor construction with RFB and their lack of operational reliability due to using of precision pairs with very small radial clearances, as well as the possibility of contamination of small holes, and in particular the izodromical jet 3.
These types of controllers are widely used in a number of stationary and transport GTUand GTE that are designed for exploitation in a wide range of external conditions.
Along the considered types of speed governor in modern gas turbine engines and gas turbine also useddrives with good static and dynamic characteristics, but that did notinclude in their construction slide pairs. This, along with hydraulicregulatorswerewidelyusedelectrical andelectronicspeedcontrollers, which have several advantagesand can improve the performance ofACSspeedrotorsGTU (GTE).
Date: 2015-02-16; view: 1590